特長

スムーズに入退出できるIフロー構造と、開放的で広いスペースによって、搾乳中の牛が快適に過ごせることが結果的に牛群全体の乳量増加と良好なコンディション維持につながります。
ハイブリッドアームの採用により、従来機に比べ大幅なエネルギー削減を実現しました。また高品質な構成部品の採用やメンテナンス性を重視した設計により、トラブルとサービスコストの削減にも貢献しています。

タッチスクリーンのインターフェイスを大幅に見直し、イラストやアイコンと使い、分かりやすく誰にでもすぐ理解でき、必要な情報を速やかに確認できるようになりました。

高品質な構成部品を導入し、ロボット内部構成はメンテナンス性を重視したレイアウト。ロボット稼働時間の最大化を目指し、信頼性を高めることが結果的に搾乳能力の向上をもたらします。
日本におけるレリーアストロノート正規代理店 コーンズ・エージーは、1997年の日本国内1号機の稼働から多くの導入実績を持ち、搾乳ロボットに関する高い技術力を培っています。省力化と効率化がもたらす生産性の高い酪農経営とゆとりある生活環境の実現を目標に、万全かつ充実のサポート体制を提供します。
■認定資格
アストロノートのメンテナンス・サービス担当者は、レリー社の規定による認定資格を取得し、定期的な更新が義務付けられています。国内でも定期的に講習を開催し、新技術の取得と高い技術レベルの維持を図っています。
■24時間のメンテナンス体制
緊急時においては365日・24時間体制でメンテナンス担当者が待機し、技術・修理対応を行います。また、アストロノートが常に100%の能力を維持出来る様に、各種メンテナンス契約内容に沿って定期的な点検作業を実施しています。
機能
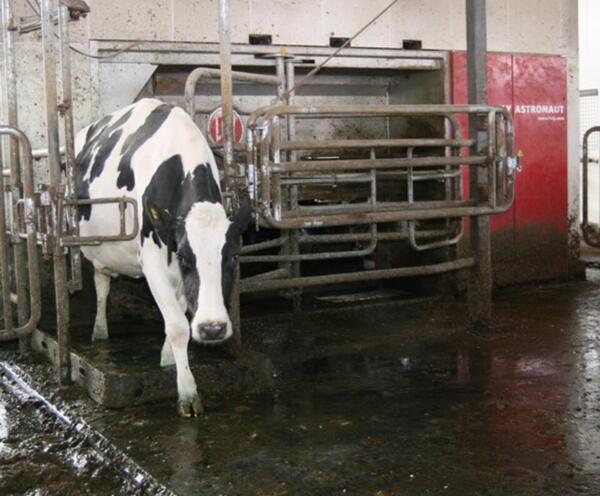
アストロノートの搾乳は牛の自発的な訪問を前提とし、牛に優しい、牛を主体として設計されています。
アストロノートでは、直進のままでのロボットの入退出をおこなうことで障害物に阻まれることのない導線が、ロボットの稼働効率を上げて、また無駄なロボット内での滞留をなくして生産性を更に向上します。

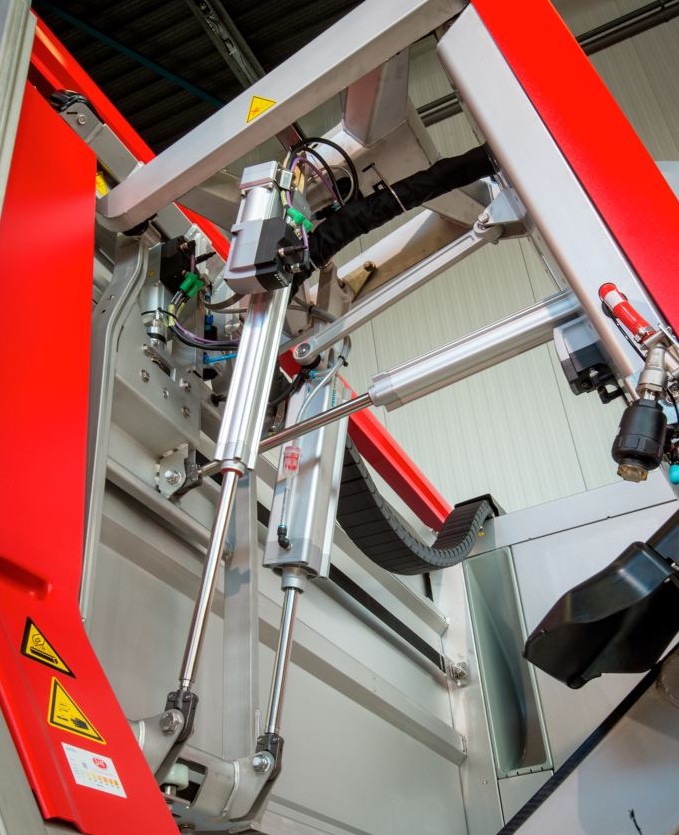
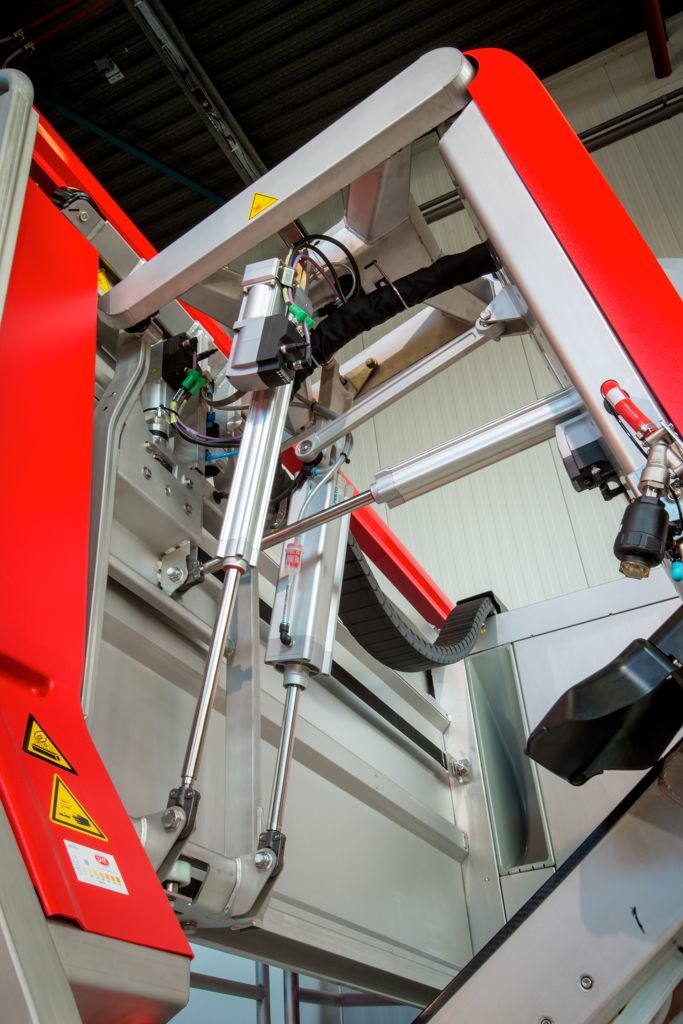
ロボットアームは、設計コンセプトの大幅な見直しを行い、動作やエネルギー消費面で大幅な改良を遂げました。エアと電動制御のコンビネーションにより、精密な動作と省エネルギーを達成しています。
カウフレンドリー
電動制御によりアーム制動音が減少。正確なアームの動きと静寂性により、搾乳中の牛にとってロボット内を快適な空間として過ごすことができます。
セーフティーファースト
牛がアームに乗り上げた場合も、牛にもアームにも損傷なく、ダンパー機能によって衝撃を緩和します。
エネルギーセーブ
エア消費が従来モデルに比べ約85%の削減※に成功し、結果としてロボット1台あたりの全体エネルギー消費量を20%削減することが可能になりました。
※アストロノートA5導入テスト農家での調査結果

牛がロボットへの入退出を直線的に行うこと、それがIフローコンセプトです。スムーズに行われる入退出が牛たちのストレスを軽減し、搾乳終了後、出口ゲートと共に本体に格納される飼槽の構造と相まってロボット内での停滞をなくします。これが24時間という限られた時間をより有効的に活用することを可能として生産性の向上へ直結します。

操作性の向上は搾乳ロボットでの作業効率を上げ、ロボットの能力を最大限引き出します。
アストロノートA5は操作用タッチパネルのインターフェイスを全面的に見直して、目的とする項目を一目で把握、必要な機能に速やかにたどりつけるようにデザインしました。
個体識別用タグ クエスHR-LDn内蔵の機能により、牛の活動量を計測し、精度の高い発情検知が可能になります。加えて、高精度なサウンドセンサーが、採食と反芻の咀嚼音質を判別し、反芻音のみを正確にカウントします。
反芻時間データは、採食量や粗飼料品質を把握でき、個体の健康状態の把握にも大きく貢献します。さらに活動量データと組み合わせることで、発情判断の基準として役立ちます。

活動量、反芻時間データは、2時間区切りでタグ内に保存され、ロボットシステムに接続するLDコントローラーによって、最大200m×500mの範囲内で、デジタル電波で20分ごとに取得することができます。
個体情報を定期的に把握できることから、発情兆候を見逃すことなく、発情のピークを見極め授精適期を容易に判断することができます。
また、タグの装着により、ロボット搾乳牛だけでなく、育成牛や乾乳牛でも活動量、反芻データの収集が可能です。
ロボット内フロアに設置したロードセル(重量計)により体重を計測します。搾乳ごとに測定される体重推移をみることで、今まで目視で判断されていた牛のボディコンディションに加え、厳密な数値として表示し、分娩前後に発生しやすい周産期疾病の早期発見に大きく貢献するとともに、エネルギー補填の指標ともなります。
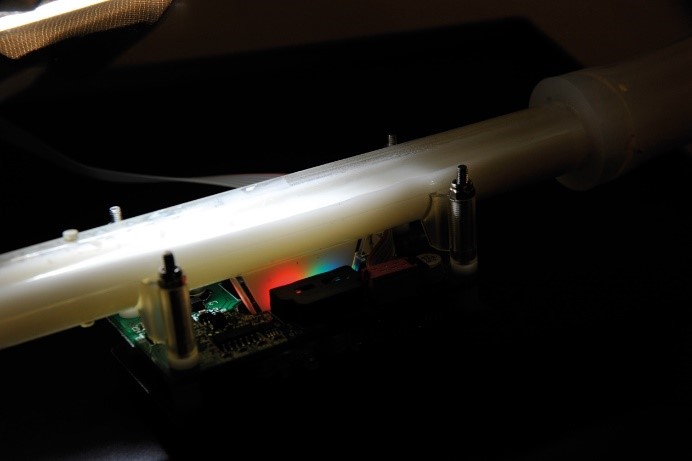
ロボットアーム内に備えられたセンサーが搾乳直後のミルクを分房別に検知し、乳色、伝導率、乳温といった乳質データを計測し、異常乳を判断します。
乳質データは個体別、分房別に表示され、注意すべき牛を抽出し、乳質異常の分房を特定することが可能になります。
乳頭装着前に殺菌水を含んだ洗浄ブラシにより物理的に乳頭の汚れを除去します。同時に乳頭に刺激を与え、オキシトシンの分泌を促すことで、スムーズに泌乳開始されます。

三層のレーザースキャニングで乳頭を検知し、ティートカップを素早く装着します。様々な乳房の形状や乳頭位置に対応した装着性能を備えています。

ボックス上部に装備された3Dカメラが牛の入退出・牛のサイズ・立ち位置等の認識を行います。高い認識機能はわずかな牛の動きも認識し、牛の動きに合わせた素早いロボットアームの追従を実現しています。
ソフトウェア
仕様
フォトギャラリー
ムービー
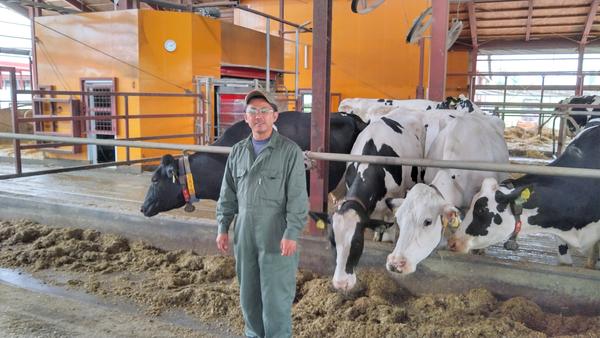
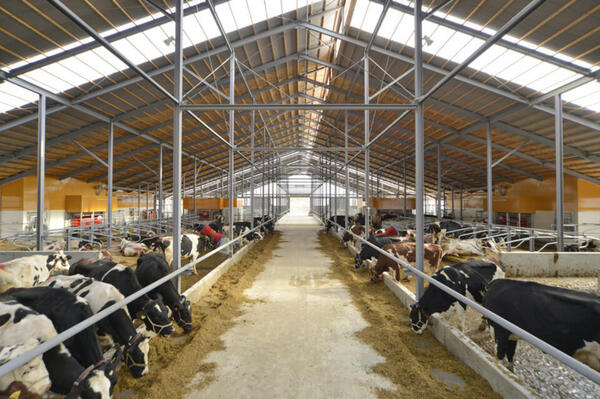
導入事例

■飼養頭数:426頭
■搾乳頭数:210頭
■作業人数:6名(ご本人・日本人スタッフ2名・外国人スタッフ3名)
■搾乳ロボット稼動開始:2019年3月
■導入設備
・アストロノートA4×1台
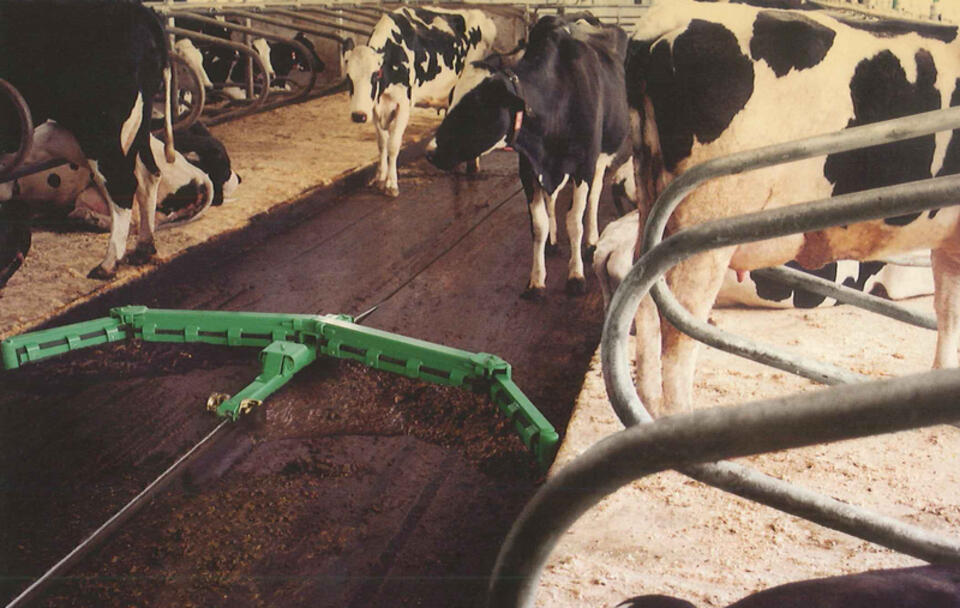
・餌寄せロボット JUNO
・哺育ロボット Calm
※2021年7月 取材時の情報

■飼養頭数:450頭
■搾乳頭数:200頭
■作業人数:6名(ご本人・ご家族3名・外国人技能実習生2名)
■搾乳ロボット稼動開始:2018年4月
■導入設備
・アストロノートA4×4台
・餌寄せロボット JUNO
・フィードステーション
・SECCO社 自動換気システム
・EYS社 クイックコンポスター
・ミューラー社 搾乳ロボット向けチラー
・BVL社 牛床用スプレッダー Vコンフォート
※2021年7月 取材時の情報

■飼養頭数:280頭
■搾乳頭数:150頭(ロボット搾乳牛:104頭)
■作業人数:4名(ご本人・従業員3名)
■搾乳ロボット稼動開始:2018年5月(アストロノートA2導入:2005年)
■導入設備
・アストロノートA4×2台
・餌寄せロボット JUNO
・SAC社 自動離脱式ミルカ― ユニコ
・GEAフール社 バーンスクレッパー
※2021年7月 取材時の情報
■飼養頭数:600頭
■搾乳頭数:315頭(ロボット搾乳牛:236頭)
■作業人数:15名(ご本人・奥様・従業員5名・パート8名)
■搾乳ロボット稼動開始:2017年5月
■導入設備
・アストロノートA4×2台
・アストロノートA5×2台
・餌寄せロボット JUNO
・ミューラー社 バルククーラー
・GEAフール社 バーンスクレッパー
・ミルクライン社 ミルキングパーラー
・シトレックス社 PREMIAM-MAXI200 ほか
※2021年7月 取材時の情報


■飼養頭数:740頭(うち経産牛300頭→500頭に増頭予定)
■施設 :フリーストール牛舎2棟(1棟250頭規模)
哺育舎・育成舎・乾乳舎
■所在地 :北海道上川郡新得町(新得町農協)
■代表 :太田眞弘様
■人数 :従業員4名・研修生
■搾乳施設:搾乳ロボット7台
■飼料供給:JA新得町TMRセンター
※2016年9月取材時

■飼養頭数:経産牛330頭 → 500頭(2016年度中に増頭予定)
■施設 :フリーストール牛舎1棟(520頭規模)・哺育舎
■所在地 :北海道足寄郡陸別町(陸別町農協)
■人数 :構成員3名・技術指導員1名・従業員6名(事務2名含む)
■搾乳施設:搾乳ロボット6台、アブレスト(60頭用)
■飼料供給:陸別町TMRセンター
■稼動開始:2016年4月
※2016年6月取材を元に更新

■飼養頭数:220頭(搾乳牛130頭・育成牛90頭)
■作業人数:4名(家族)
■搾乳ロボット稼働年度:2014年8月
※2015年1月取材時の情報
■搾乳ロボット4台稼働年度:2014年11月
■飼養頭数:約850頭(搾乳・乾乳牛500頭・育成牛350頭)
※ロボット搾乳牛220頭
■作業人数:家族3名、従業員・実習生
※2016年9月時点
アストロノートA3Next 2台導入
稼働年度:2011年9月・10月
■労働人数:4名、雇用2名
■飼料畑面積:牧草75ha、コーン40ha

■飼養頭数:170頭
■給餌回数:1日7回

■飼養頭数:71頭(搾乳牛:47頭・育成牛:24頭)
■労働人数:2名
■1号機稼働年度:2001年4月
■2号機入替年度:2012年11月

■搾乳頭数:93頭(乾乳牛:12頭)
■育成頭数:100頭
■労働人数:3名
■耕作面積:55ha

■搾乳頭数:102頭(乾乳牛:18頭)
■育成頭数:93頭
■労働人数:3名(従業員1名)
■耕作面積:54ha(グラス:30ha コーン:24ha)